“How do airplanes stay afloat?”
“The same way a bird stays afloat.”
When we give that answer to a kid, we fondly realize the connection between nature’s creatures and machines, and that the nature influenced creation of many machines from time to time. That is why the Wright brothers spent a great deal of time observing birds in flight and realized that when birds soared into the wind, the air flowed over the curved surface of their wings, and thus generated lift which helps them stay in flight. They noticed the wings of birds minutely, and realized that they change the shape of the wings to turn and maneuver, and thus flaps and stabilizers were born in the airplane wings. In a similar fashion, various insects and birds have influenced designs of many machines for their structural and aerodynamic ability. These creatures not only helped design the structural and aerodynamic systems of large machines, but attracted considerable attention from scientists and engineers for small-scale robots. Today we deep dive into the world of small robots and how they fly!
Insects were the first organisms on Earth to take to the skies – estimates on the origin of insect flight range from ~320 to ~400 million years ago (Misof et al., 2014). That is a long, long time before vertebrates achieved this feat. Over time, insects mastered their flying ability, and achieved great perfection in speed, agility, and grace in the air. By design, insects such as hover flies and birds such as hummingbird have remarkable abilities to hover in the air, as well as being able to perform aerobatic maneuvers such as sideways or backward flying. The technique that they use is called a flapping wing motion. This remarkable ability is a key in the design of small-scale aircraft for surveillance or reconnaissance. Traditionally, engineers designed a medium to large scale aerodynamic vehicle with traditional mechanical linkage systems (Van Breugel et al., 2008). However, when it comes to an unmanned small-scale aerial vehicle (or even micro-scale that mimics the size of an actual small insect such as a hover fly), one of the key challenges in traditional designs was that the flapping-wing action was not stable because of the power and weight ratio that needs to be achieved to match the hovering and flying abilities of the insects and birds observed in nature.
Historically, there have been a number of research efforts that focused on the mechanical and structural aspects of a small-scale flying robot design. One such project was the Entomopter project in Georgia Tech (Michelson et al., 1998). The researchers used a chemical muscle to produce linear actuation strain. Two sets of rigid wings (front and back) were placed, and chemical muscle actuated them. Other traditional designs of small-scale flying robots used gears and links for the movements needed for of an airborne vehicle.
How do the “insect” robots get up in the air?
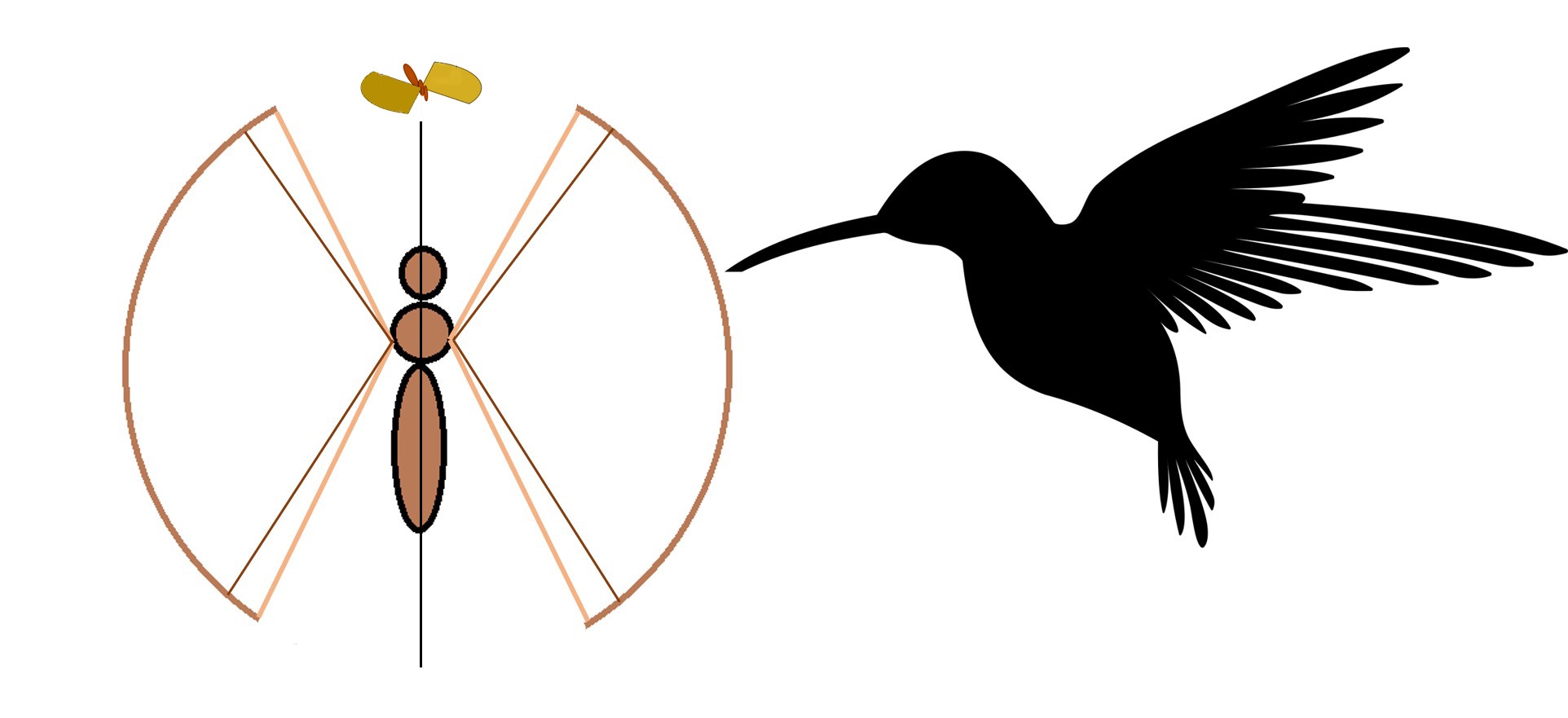
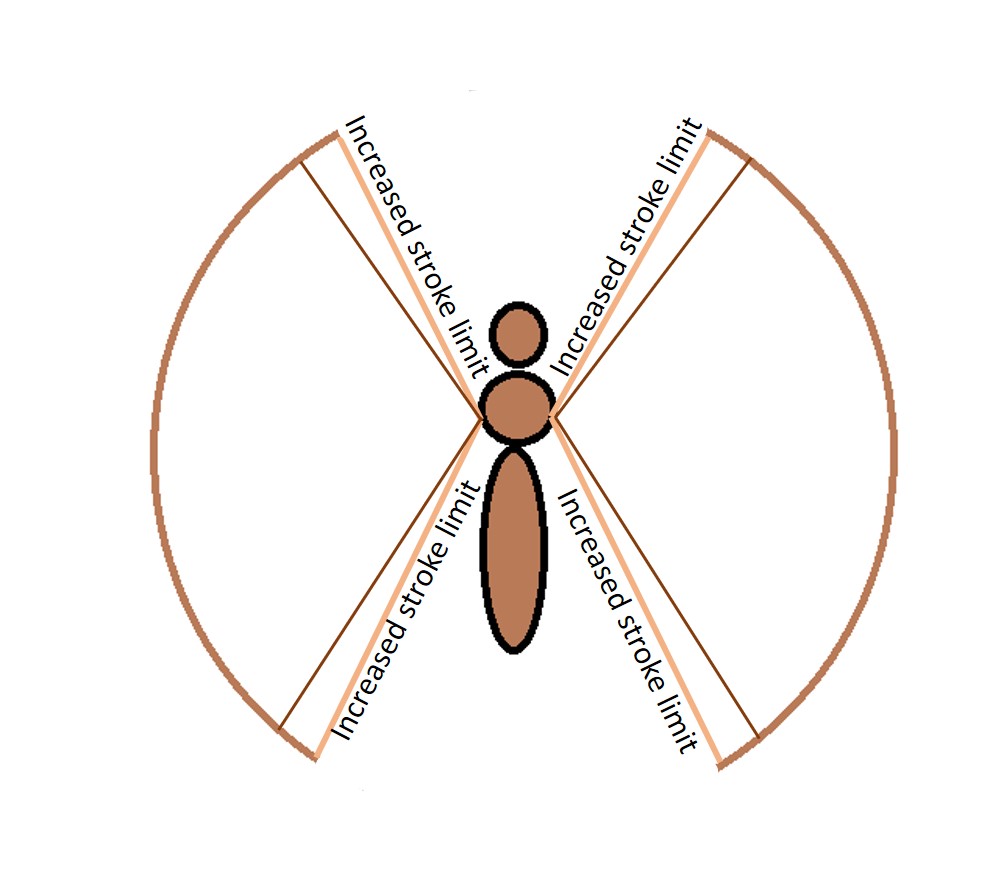
In order to achieve a flapping action in-flight to gain altitude, sweeping and the pitching motions are needed to be achieved. The current design is set up to exploit resonant properties, as exhibited by flying insects, to reduce the energy expenditure and to provide amplitude amplification for the wing sweeping motion (Bolsman, 2010). Design objective for a small-scale flying machine is to reproduce a reference motion based on the kinematics of insects. Insects and birds perform wing flapping and adjustments of the body orientation in order to control speed, altitude and orientation of the flight. As shown in the figure below, to transfer this analogy to a micro-robot, the sweeping motion of the wings are emulated as a steady-state motion. The details of a control system can be found in advance literature (Bolsman, 2010). However, in simple terms, the design takes into account a constant resonance frequency, and a maximum wind sweeping stroke. As the stroke increases (shown by the extreme lines in the figure), the wings generate lift. The mass of the device (as in an insect) is centered towards the geometric center of the device, resulting in maximum possible stability. This is the stage where the robots get airborne and continue hovering.
How do the “insect” robots move in the air?
The hovering is the first state of condition that the robots achieve, similar to an insect. The figure above shows a simple two wing device. Each wing is designed to have independent controls to change flapping In order to change the direction to left or right, so that each wing is capable of having a different sweeping motion. This inevitably creates a sweeping motion that are not equal in each wing, and results in a rotation in the direction of the difference. An insect performs these exact same maneuvers to create a rotational motion for left-right (rolling) movement.
As shown in the figure, the center position holds the center of mass for the whole assembly. As such, changing the center position of the sweeping motion will change the direction of flight as well. This is performed by shifting the positions of the effective centers of pressure of the left and right wings. This invariably creates a backward motion (or pitch), and more power from the device’s power source provides a required forward motion while maintaining the achieved altitude.
How strong are these “insect” robots?
A simple model of a small-scale flying robot has been described here to depict the fundamentals that are derived from an insect or a small bird for flapping motion design. A fully fledged flying micro robot has more control systems that are able to achieve a full range of motions if needed, with more complicated actuations that are associated with multiple wings and wing rotations. In addition, structural integrity is also a key factor which, surprisingly, is also derived from insects. One of the most fascinating and extraordinary creatures in earth are ants, they can carry objects several times of their body weight. Ant’s neck has a very sturdy construction by nature, because of the fact that they lift the large weights with their mouth, and the load is transferred through the neck. Researchers found from models that an ant’s neck can withstand loads of about 5,000 times the ant’s body weight! (Nguyen, 2012). This design is also simulated to be able to provide the micro robots a sturdy yet very lightweight construction, a critical requirement for such a device.
Ultra-light, small scale robots are in use for surveillance, military operations, rescue missions, medical sector, hazardous material test/retrieval, and many other scenarios. We will continue to see the marvelous development of these micro machines, inspired by the insects and small birds around us, while pondering over the question: “how birds fly?”
References:
- Bolsman, C. T. (2010). Flapping wing actuation using resonant compliant mechanisms: An insect-inspired design.
- Van Breugel, F., Regan, W., & Lipson, H. (2008). From insects to machines. IEEE robotics & automation magazine, 15(4), 68-74.
- Misof, B., Liu, S., Meusemann, K., Peters, R. S., Donath, A., Mayer, C., … & Niehuis, O. (2014). Phylogenomics resolves the timing and pattern of insect evolution. Science, 346(6210), 763-767.
- Michelson, R. C. (2000). S. Patent No. 6,082,671. Washington, DC: U.S. Patent and Trademark Office.
- Michelson, R. C., & Reece, S. (1998, March). Update on flapping wing micro air vehicle research-ongoing work to develop a flapping wing, crawling entomopter. In 13th Bristol International RPV/UAV Systems Conference Proceedings, Bristol England(Vol. 30, pp. 30-1).
- Nguyen, V. N. (2012). Development of a Finite Element Model of an Ant Neck Joint for Simulation of Tensile Loading(Doctoral dissertation, The Ohio State University).

